
Projet 'Radar-de-Recul'
- Type: Application Web
- Framework: Arduino
- Projet: Scolaire
- Date: Mai 2022
- GitHub: Lien du projet
Description du projet Radar-de-Recul
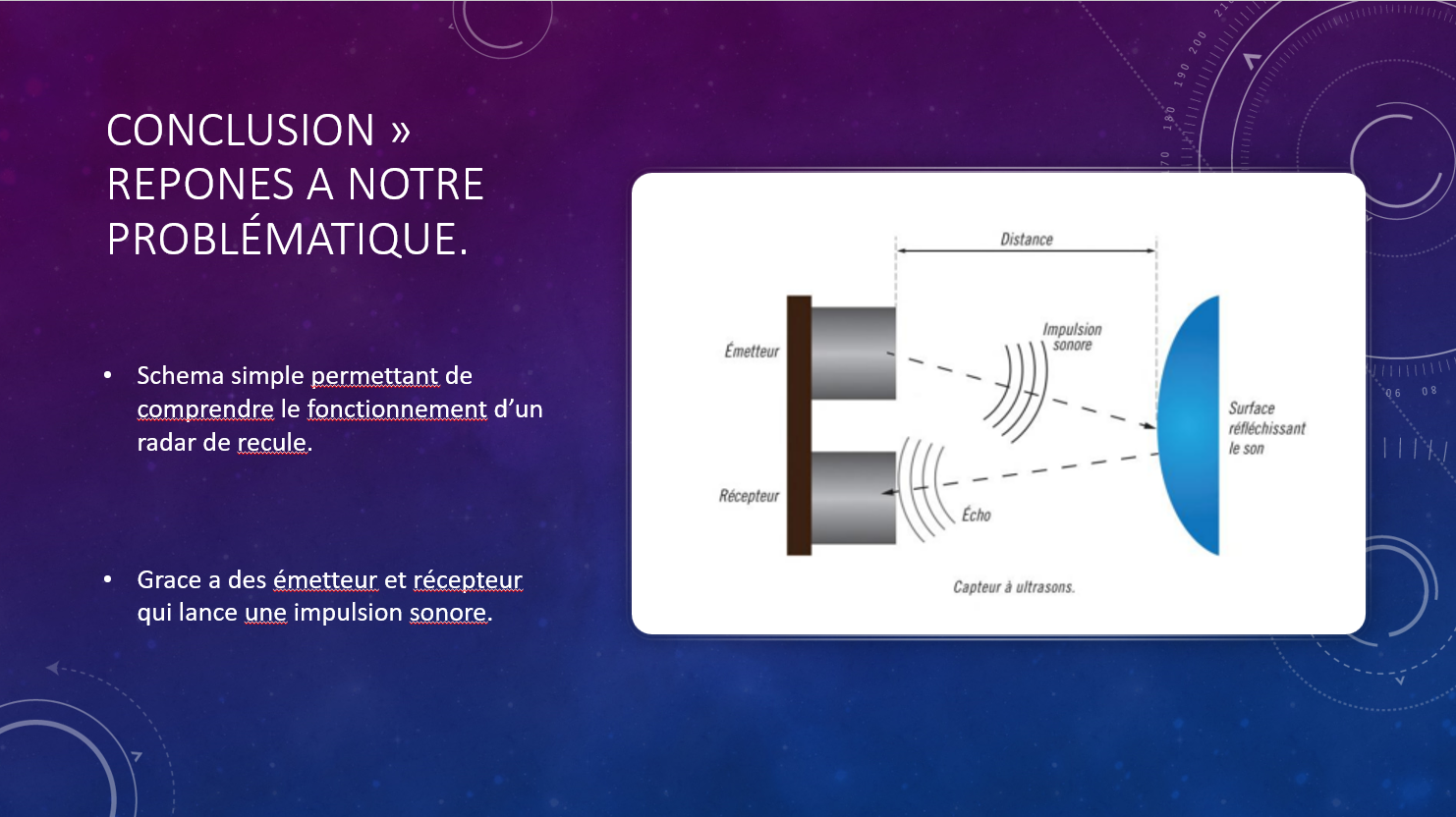
Problématique : Comprendre le fonctionnement du radar de recul d’une voiture.
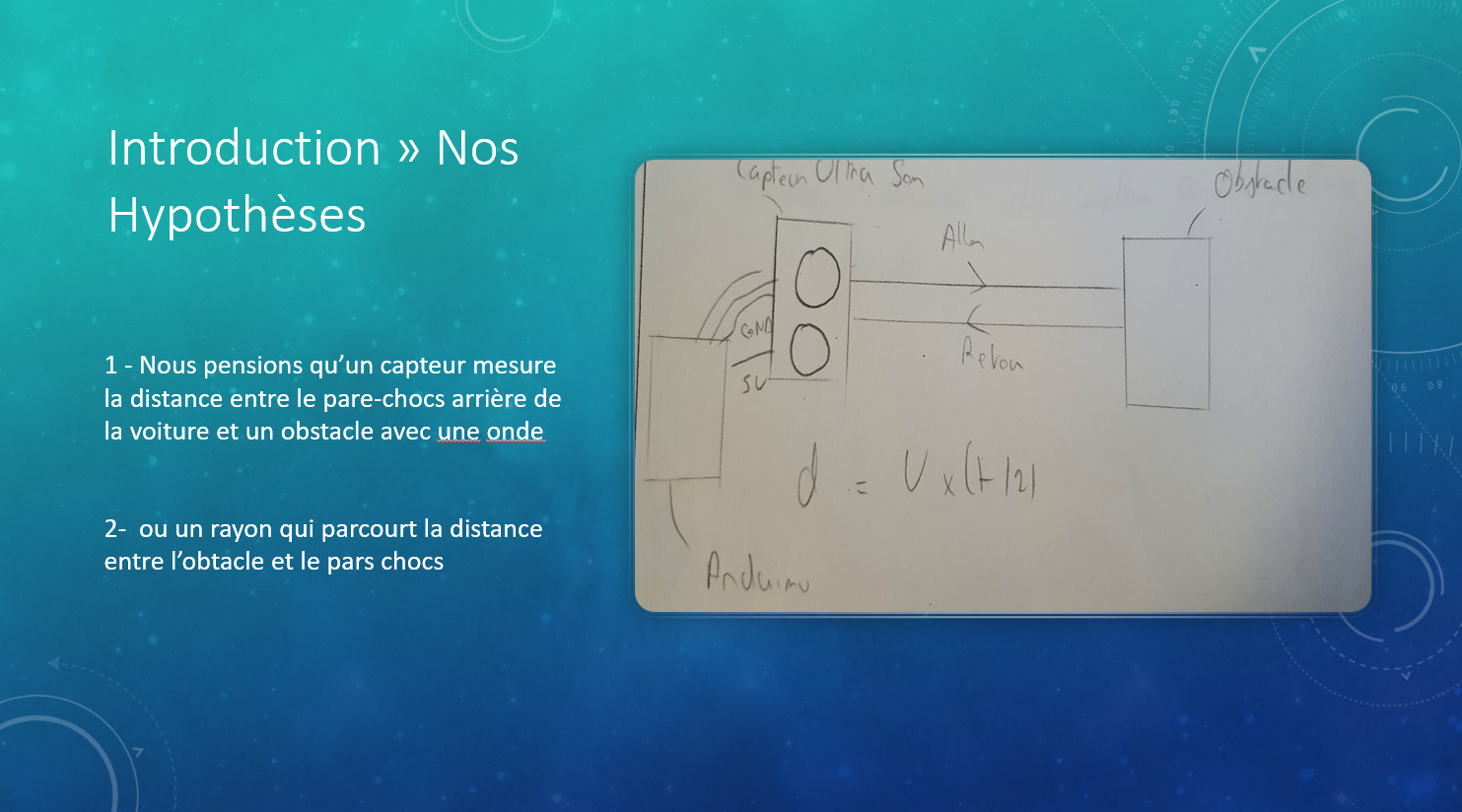
Hypothèses :
Un capteur pourrait mesurer la distance entre le pare-chocs et un obstacle en émettant une onde ou un rayon.
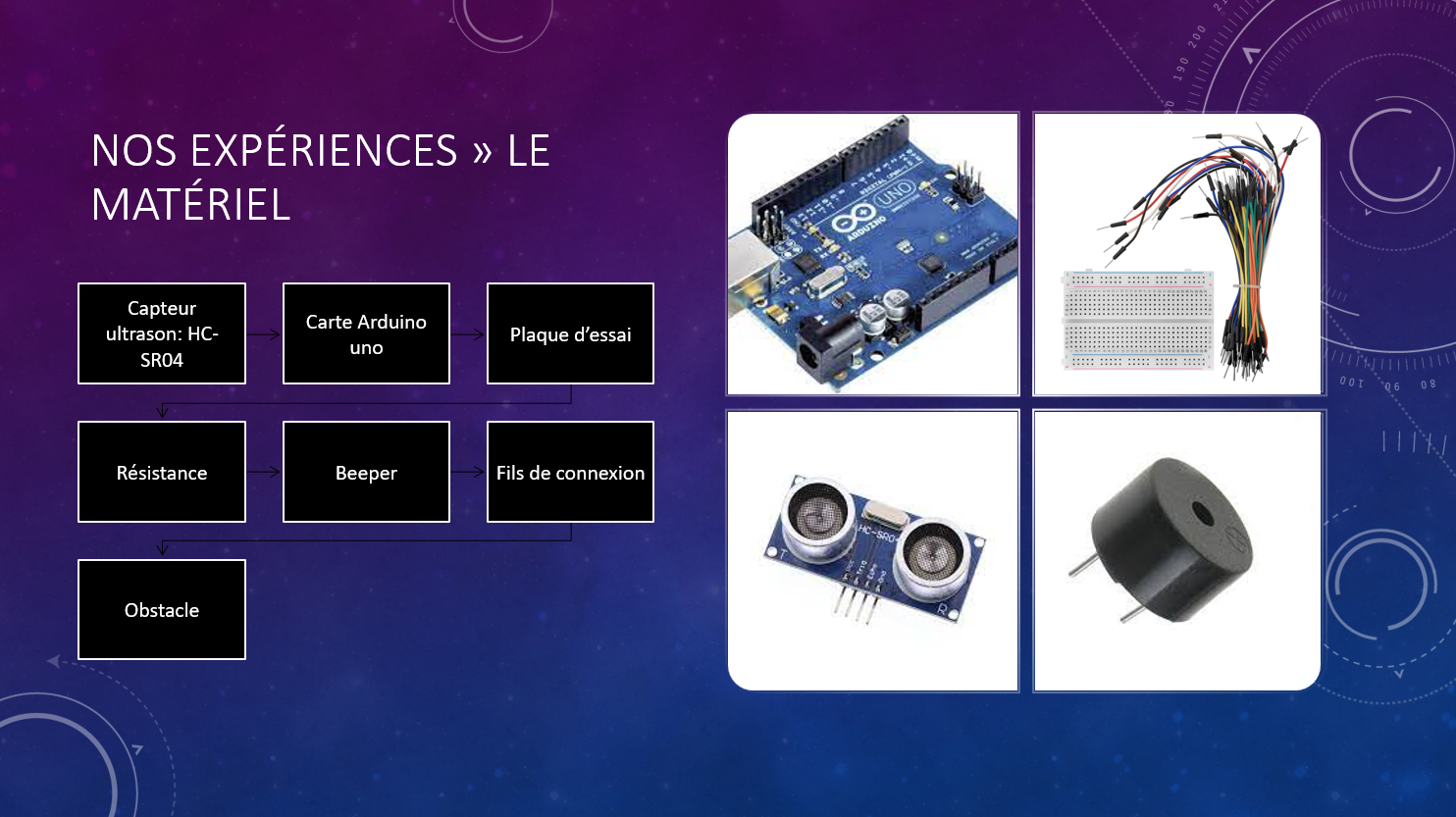
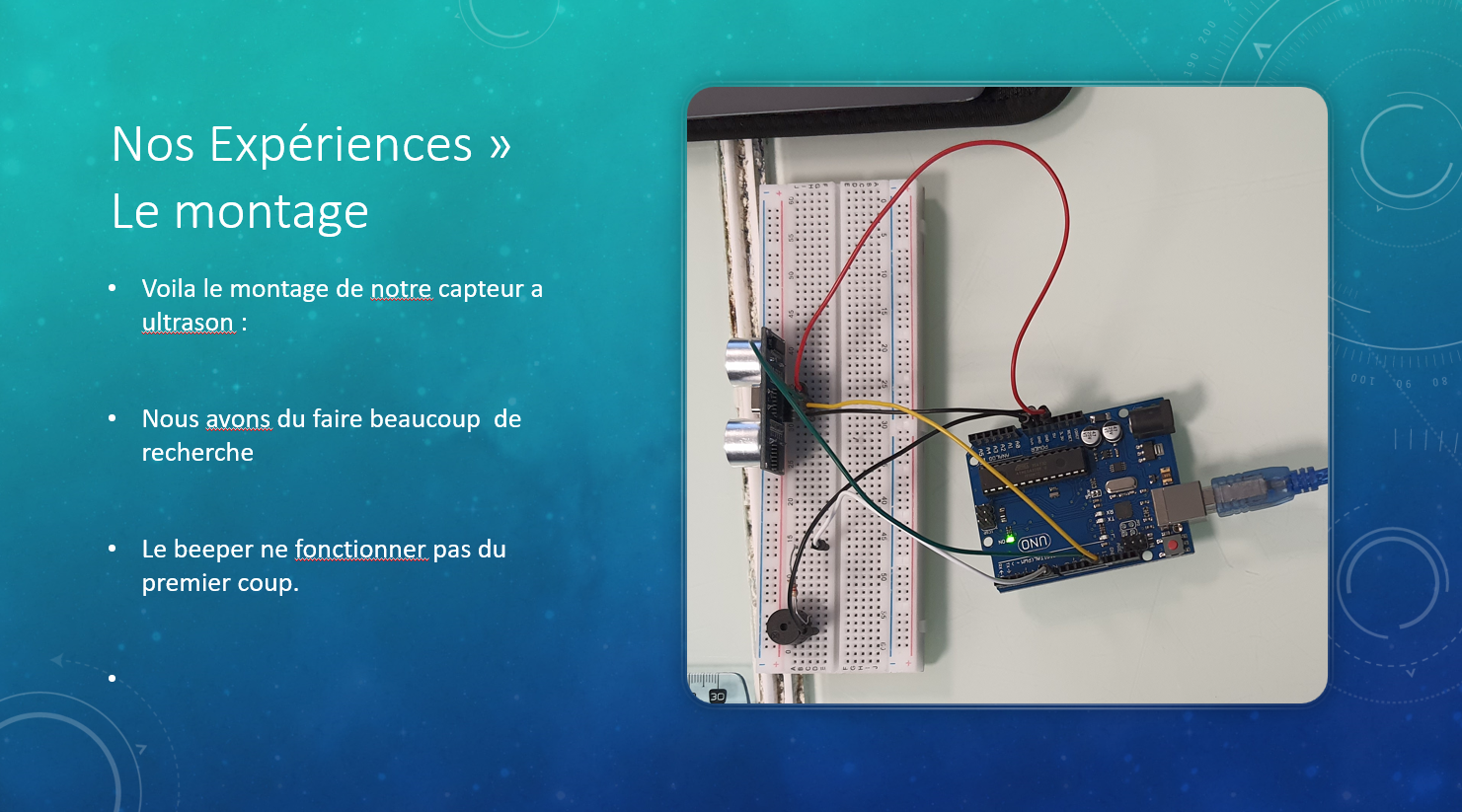
Expériences :
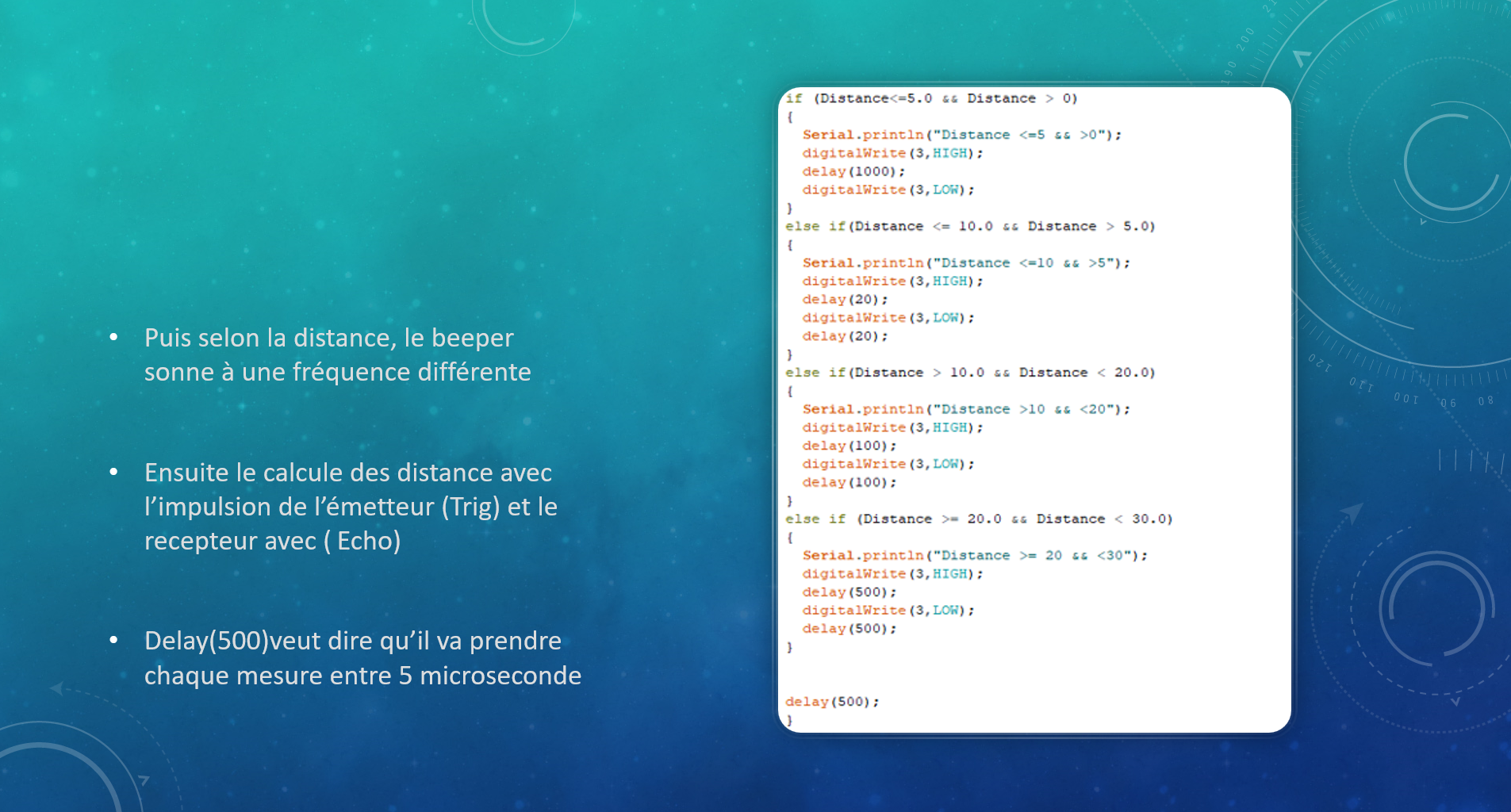
Un capteur à ultrason (HC-SR04), une carte Arduino Uno, et un beeper ont été utilisés pour tester et illustrer ce processus.
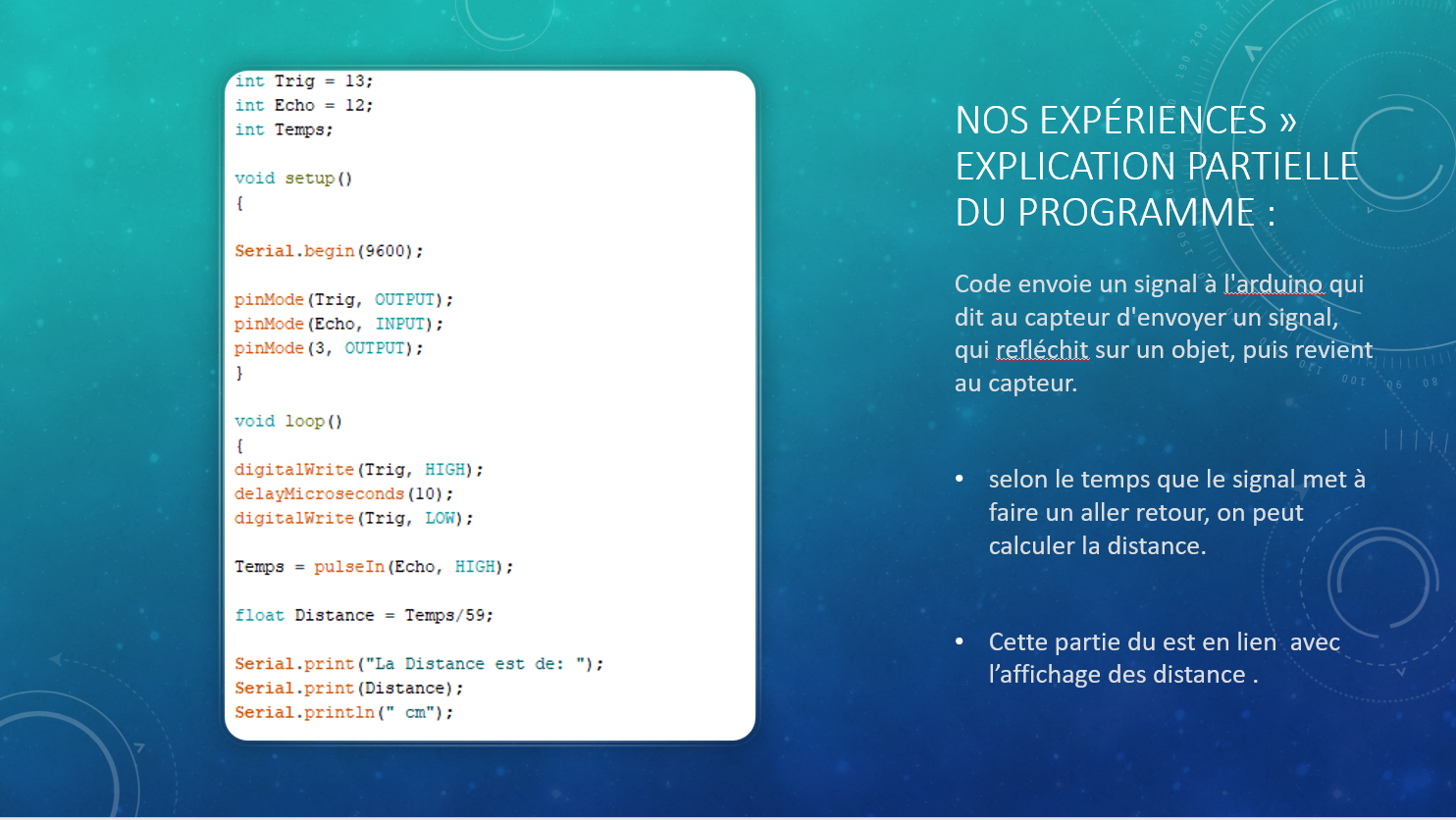
Le montage implique l’émission d’un signal par le capteur, qui rebondit sur un objet et revient pour calculer la distance selon le temps de trajet.
Résultats :
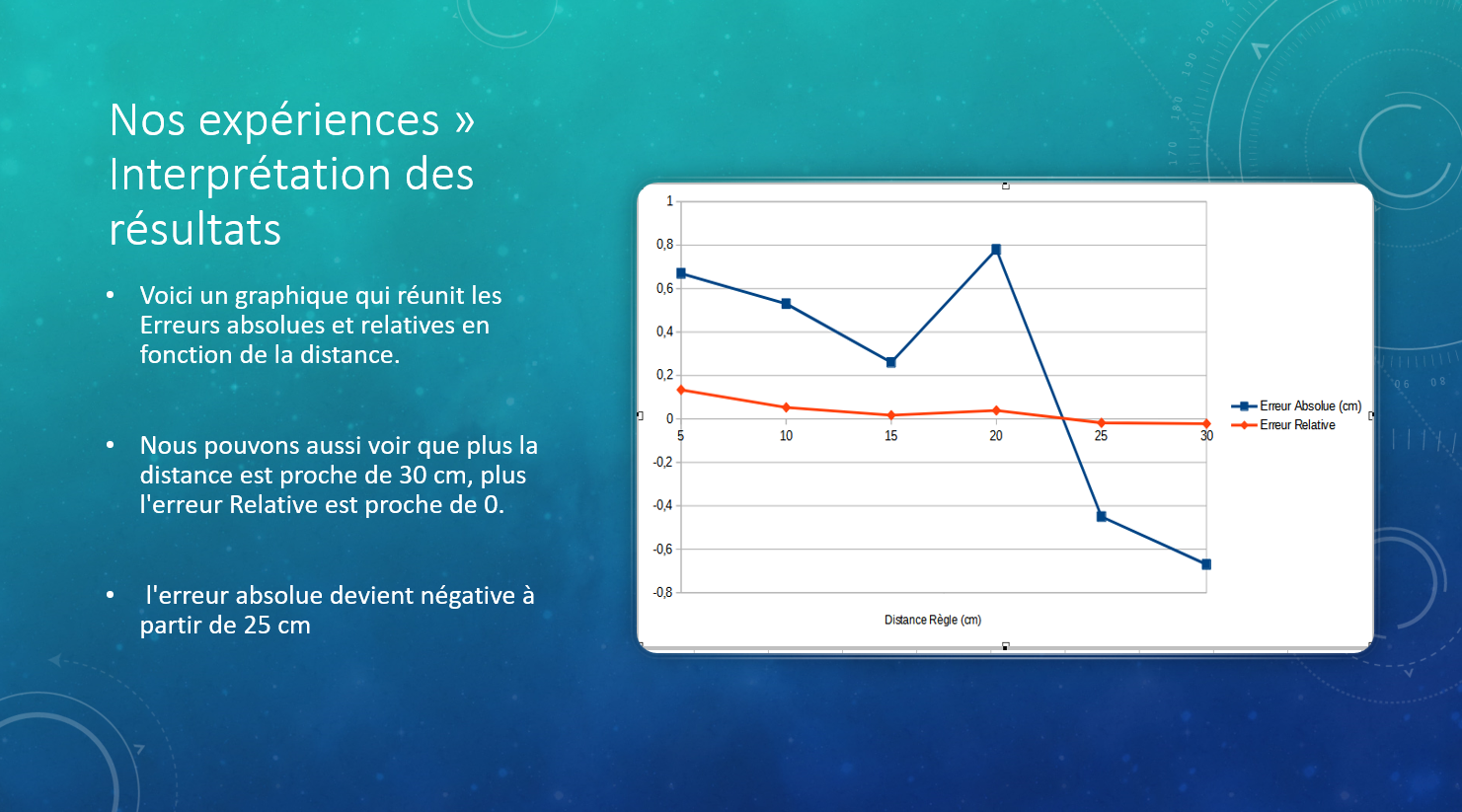
Un graphique montre que plus la distance est proche de 30 cm, plus l'erreur relative est faible.
Lorsque la distance est inférieure à 25 cm, l'erreur absolue devient négative, indiquant une limitation dans la précision.
Conclusion :
Le projet a validé l’hypothèse initiale : un capteur de recul utilise des émetteurs et récepteurs pour envoyer une impulsion sonore et calculer la distance en fonction du temps de retour du signal.
Afin de réaliser ce projet nous avons travaillé en équipe de 4.